

 联系我们
联系我们

随着“工业4.0”、“中国制造2025”等概念的提出,制造业对自动化、智能化生产模式的物流仓储系统的需求量日益增长。环形车系统作为现代化的物流运输和仓储系统的关键设备之一,在搬运方面具有很高的灵活性,正逐渐应用于越来越多的自动化立体仓库中。
本文所阐述的环形车系统已成功应用于宁波公牛电器有限公司自动化立体仓库,目前已稳定运行两年。该系统的应用降低了物流设备的成本,提高了物流系统中托盘货物的输送、拣选效率。
1 工艺设计
1.1 环形车(RGV) 系统主要组成
所述RGV 系统包括环形轨道、行走驱动单元、移载驱动单元和检修区。系统能在两个方向上按照一定的任务进行往复运动(运行、移载)。通过这些运动,完成对托盘货物的入库、出库、拣选等搬运作业。
该RGV 系统在运行方向上采用双电机变频调速控制,因此加速度较大,动态响应性能高于一般的穿梭车,可以快速根据不同的指令将货物准确地送到指定位置。见图1。
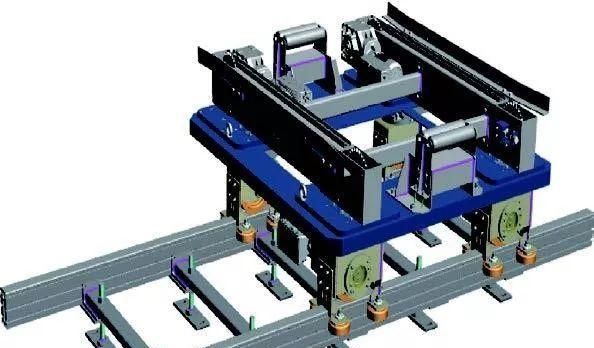
图1 环形车3D 图
1.2 控制系统产品选型
在环形车系统主从调速控制中应用的Siemens 产品见表1。

图1 环形车3D 图
2 调速方案分析
2.1 主从控制*常见的两种方法
1)直接给定转矩值
主要应用于电机之间是硬连接方式,如齿轮、同轴等,电机之间通过连接器保持相同的转速。此方法使负载保持以稳定的力矩运转,不控制传动设备速度。但是如果负载突然消失,如断带,会造成飞车。
2)速度环饱和转矩限幅
其实质仍是速度控制,对于双闭环控制系统,速度环是外环,电流环是内环,速度环的输出作为电流环的输入。当速度环达到*大,速度控制器以*大值输出,这时电流环获得*大值,变频器控制电机输出*大转矩,可通过调节转矩限幅控制输出转矩。
该方法的优势在于当速度环饱和时可通过转矩限幅控制传动设备输出力矩,在出现负载故障时速度环立刻退饱和,速度环起作用,以有效防止飞车。
2.2 系统运行调速分析
环形车系统为达到既定的加速度,使用双电机来驱动车体,实现主从控制。机械结构为主从轴同侧且之间无硬轴连接,在实际运行中,按照要求的加速度车轮和轨道之间很难保证不打滑,故在保证主从轴相同的运行速度以及转矩平均分配的同时,需要选定合适的方法。见图2
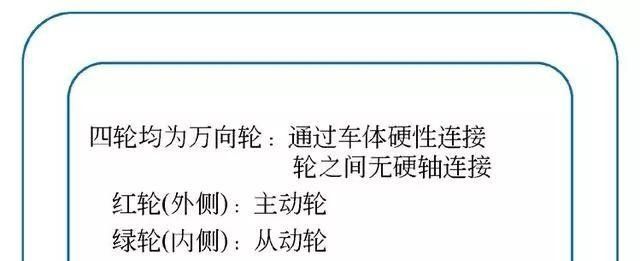
图2 环形车运行轨迹示意图
通过现场重载高速反复试验,选择速度环饱和转矩限幅方法作为*终调速方案。该方法可避免特殊情况下可能引发从机飞车的风险,增大了运行安全系数。
3 G120 变频器主从调速方案分析
3.1 G120 变频器主从控制硬件配置简介
ET200S CPU151-8 做主站,两个CU240E-2PN 分别做从站,通过PROFINET 网络连接,主站下发运动控制指令协调两从站的输出。见图3。
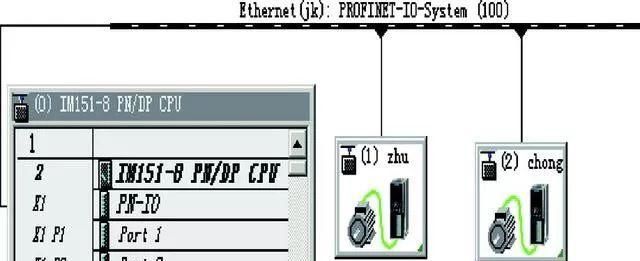
图3 硬件配置
3.2 G120 变频器主从控制拓扑结构
ET200S CPU151-8 通过PROFINET 协议与两个CU240E-2PN 通讯,主机与从机之间的转矩值、转速值的通信传递通过模拟量来实现,主机与从机的启停命令通过PROFINET 由CPU151-8 直接给定。见图4。
4 G120 变频器主从控制参数设置与接线
4.1 G120 变频器速度环饱和转矩限幅参数设置
G120 变频器速度环饱和转矩限幅参数设置见表2和表3。
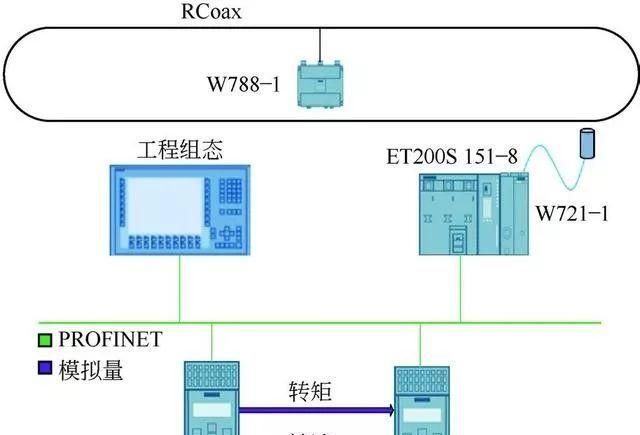 图4 系统网络拓扑图
图4 系统网络拓扑图
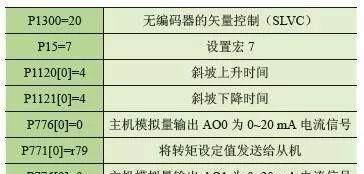 表2 主变频器参数
表2 主变频器参数

表3 从变频器参数
4.2 G120 变频器速度环饱和转矩限幅的接线方式
主变频器的AO0 和AO1 输出端口(12、13)和(26、27)连接;从变频器的AI0 和AI1 输入端口(3、4)和(10、11)连接。
4.3 运行效果曲线图
主机:监视变量r60 和r63;加速度达到了1.0 m/s。见图5。
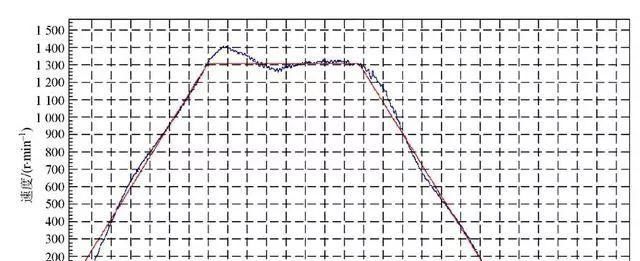
图5 主机速度运行曲线
从机:监视变量r63;加速度达到了1.0 m/s。见图6。
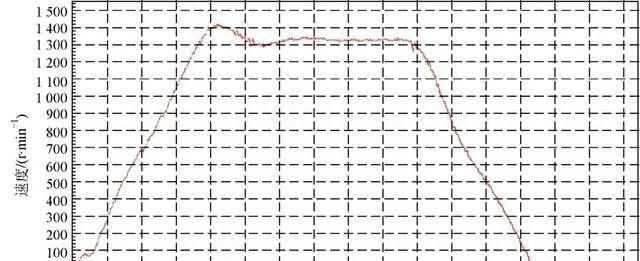
图6 从机速度运行曲线
5 S120 变频器主从调速方案分析
S120 变频器主从控制方案硬件配置见图7。ET200S CPU151-8 做主站,1 个CU320-2PN 做从站,通过PFOFINET 协议通讯, S120 通过Drive_CliQ 来控制主、从两轴的运动输出。
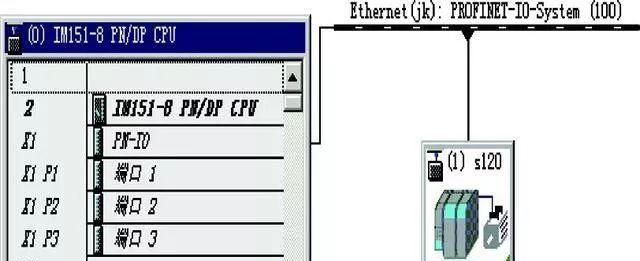
图7 硬件配置图
S120 变频器主从控制方案网络拓扑见图8。控制单元CU320 通过PROFINET 协议连接两个CUA32 进NEW PRODUCT NEW TECHNOLOGY 新产品新技术行通讯;电机编码器通过CUA32 的SUB_D 接口反馈给变频器形成速度闭环。

图8 主从控制网络拓扑图
S120 变频器主从控制方案优点:
1)多轴之间很容易实现通讯,各轴之间的数据能共享;
2)控制单元CU320 处理速度比CU240 快很多,响应速度快;
3)容易实现功能的扩展,如定位。可以为公司全系列产品的统筹提供帮助,如优化备件、服务和调试;
4)方便实现知识产权保护;
5)此种控制方式提供了*佳的控制效果。
S120 变频器主从控制方案缺点:
1)CU320 体积较大,占用较大空间,对于环形车系统安装不方便;
2)相对于G120 系列变频器CU240E,其价格偏高。
主从机运行曲线见图9,主机监视变量r60 和r61,从机监视变量r60 和r61。
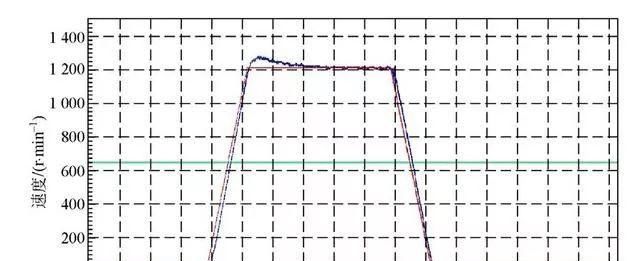
图9 主从机运行曲线
主从机转矩曲线见图10,主机监视变量r79,从机监视变量r80。存在速度闭环反馈的情况下,主从机转矩值稳定性较高。
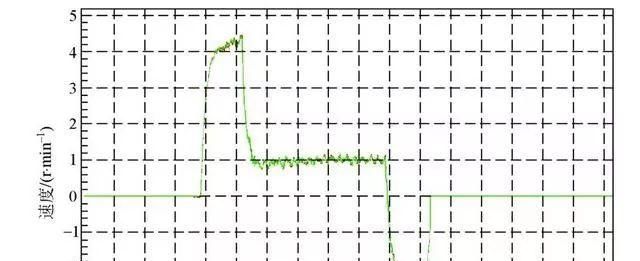
图10 主从机转矩曲线
6 项目难点分析与解决
所述环形车系统性能参数:载重量1 000 kg, 运行*大速度 200 m/min, 运行加速度1 m/s2,单台环形车效率30 托盘/h。
1)对于直接转矩给定的主从调速方式,在反向运行或者高速时会出现车轮与轨道之间打滑现象,此时会报F07901 故障,原因是因为这种调速方式转矩环响应过快,轨道上如有接头或者振动,从机就会因超速而报故障。
2)对于速度环饱和的设置,通过附加给从机额外10% 的速度,使得从机在运行过程中始终达到速度环饱和,也就保证了主从轴的出力一致和负荷的平均分配。
3)对于转矩限幅的控制,电机在加速段转矩值为正,减速段转矩值为负,控制主机限幅的输出为正值,通过设定从机自由功能模块的方式来设定从机的限幅与实际情况相对应。
4)通过方案分析与比较,可知G120 主从控制调速参数设置较繁琐,需通过模拟量接线传递,运行效果一般,处理速度一般,但同时其易于安装,能够达到±5 mm 的精度,性价比相对较高;而S120 主从控制调速参数设备较简单,内部互连,不需额外接线,运行效果很好,精度能达到±2 mm,处理速度较快,响应时间较短,但其尺寸相对较大,需占用较大的空间。
- 下一篇:关于西门子变送器的应用和概述
- 上一篇:西门子HMI触摸屏的优势及应用
